BGU Researchers Developed Hybrid Flying/Driving Robot
The Flying Sprawl-Tuned Autonomous Robot (FSTAR) can be used for both civil and military applications, including maintenance, agriculture, search and rescue operations and counter-terrorism missions
IsraelDefense
| 20/05/2019
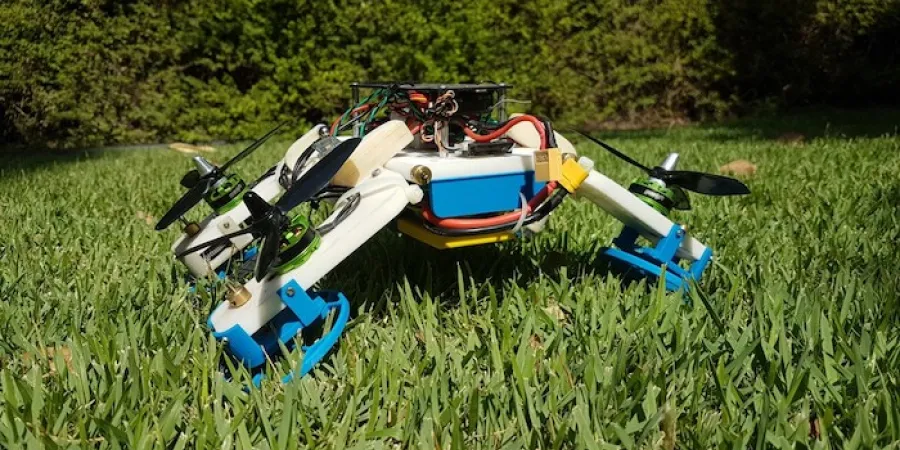
The hybrid Flying Sprawl-Tuned Autonomous Robot (Photo: BGU)
Ben-Gurion University of the Negev (BGU) researchers announced on Monday that they have developed the first experimental robot drone that flies like a typical quadcopter, drives on tough terrain and squeezes into tight spaces using the same motors.
The hybrid Flying Sprawl-Tuned Autonomous Robot (FSTAR) will be introduced at the International Conference on Robotics and Automation 2019 in Montreal, Canada on May 20. It was developed in BGU's Bio-Inspired and Medical Robotics Lab by Prof. David Zarrouk, a senior lecturer in BGU’s Department of Mechanical Engineering and head of the Bio-Inspired and Medical Robotics Lab, together with his graduate student, Nir Meiri.
FSTAR can fly over obstacles or run underneath them. The sprawl, which adjusts from a flat configuration to 55 degrees allows the robot to transform its movement from a flying quadcopter to a car-like robot. It also adjusts its width to crawl or run on flat surfaces, climb over large obstacles and up closely-spaced walls, or squeeze through a tunnel, pipe or narrow gaps.
It can run on the ground at a speed of up to eight feet per second (2.6 m/s). That combined with low energy consumption using the same motors makes FSTAR ideal for a broad range of applications that may require longer work time.
Researchers said commercial applications include package delivery, which involves flying quickly to a target zone and then drive safely and quietly to reach a recipient’s doorstep, as well as search and rescue, which requires flying over obstacles and crawling between or under cracks where regular drones can’t fly. The robot can also be used for agriculture, maintenance, cleaning, filming, entertainment, law enforcement and counter-terrorism purposes.
“We plan to develop larger and smaller versions to expand this family of sprawling robots for different applications, as well as algorithms that will help exploit speed and cost of transport for these flying/driving robots,” said Dr. Zarrouk.

The Flying Sprawl-Tuned Autonomous Robot (FSTAR) can be used for both civil and military applications, including maintenance, agriculture, search and rescue operations and counter-terrorism missions
The hybrid Flying Sprawl-Tuned Autonomous Robot (Photo: BGU)
Ben-Gurion University of the Negev (BGU) researchers announced on Monday that they have developed the first experimental robot drone that flies like a typical quadcopter, drives on tough terrain and squeezes into tight spaces using the same motors.
The hybrid Flying Sprawl-Tuned Autonomous Robot (FSTAR) will be introduced at the International Conference on Robotics and Automation 2019 in Montreal, Canada on May 20. It was developed in BGU's Bio-Inspired and Medical Robotics Lab by Prof. David Zarrouk, a senior lecturer in BGU’s Department of Mechanical Engineering and head of the Bio-Inspired and Medical Robotics Lab, together with his graduate student, Nir Meiri.
FSTAR can fly over obstacles or run underneath them. The sprawl, which adjusts from a flat configuration to 55 degrees allows the robot to transform its movement from a flying quadcopter to a car-like robot. It also adjusts its width to crawl or run on flat surfaces, climb over large obstacles and up closely-spaced walls, or squeeze through a tunnel, pipe or narrow gaps.
It can run on the ground at a speed of up to eight feet per second (2.6 m/s). That combined with low energy consumption using the same motors makes FSTAR ideal for a broad range of applications that may require longer work time.
Researchers said commercial applications include package delivery, which involves flying quickly to a target zone and then drive safely and quietly to reach a recipient’s doorstep, as well as search and rescue, which requires flying over obstacles and crawling between or under cracks where regular drones can’t fly. The robot can also be used for agriculture, maintenance, cleaning, filming, entertainment, law enforcement and counter-terrorism purposes.
“We plan to develop larger and smaller versions to expand this family of sprawling robots for different applications, as well as algorithms that will help exploit speed and cost of transport for these flying/driving robots,” said Dr. Zarrouk.
